20.Sep.17
Wheel Torque And Speed In Vehicles With In-Wheel Motors
This article was originally published on 20 September 2017.
Vehicles driven by in-wheel electric motors do not have a differential but deliver torque directly and independently to the wheels.
Most road vehicles are powered by a single engine or motor with a drive-line transferring that power to the wheels, generating torque at the wheel hubs. The wheels must be free to move at different speeds to one another to allow for cornering and variations in road surface.
This is achieved with the differential, a mechanical device which, in its simplest form, delivers equal torque to both wheels on an axle while allowing them to rotate at different speeds. Wheels can then rotate at their natural speeds as determined by the kinematics of the vehicle.
The so-called “open differential” allows any amount of wheel speed difference across an axle. Where the friction force available between tyre and road is very different on one wheel to the other, the wheel with lower friction can lose traction and spin up rapidly. This can occur during cornering, when the vehicle’s weight shifts to the outside wheels so that the inside wheels have little traction on the road surface, or when one wheel is on a surface with poor grip, for example on ice or loose stones.
This situation is clearly undesirable and several systems have therefore been developed to counteract the loss of traction while still allowing torque to be applied to the wheel with good road friction. A “limited-slip differential” is employed most commonly, or a traction control system (TCS) is used to prevent wheel spin-up. The former is a more elaborate mechanical equivalent of the open differential which limits the wheel speed differential while the latter applies the brake to a wheel which is losing traction, to prevent it spinning up.

Fig. 1: Protean Electric’s in-wheel electric motor integrating electronics and brake.
More complicated “torque vectoring” systems provide further enhancements to vehicle handling, but are rare due to their complexity and cost.
Vehicles powered by in-wheel motors do not have a differential so the question arises as to how the vehicle will behave in terms of wheel speeds and how problems associated with lack of traction can be addressed. The answers are rather straight-forward.
If the wheel-motors are controlled by making the same torque demand of each of the motors, the vehicle will behave exactly as if there were an open differential. The traction control system can be used to control loss of traction, as in a conventional vehicle. On the other hand, enhanced vehicle ride and handling can be achieved by varying the torque distribution among the wheel motors dynamically.
The in-wheel motor system
For the purposes of this article, the in-wheel motor system is considered to consist of two units installed on opposite sides of the vehicle, one in each front wheel or one in each rear wheel. Each unit comprises the electrical machine, inverter with microprocessor control and a friction brake. In the case of Protean Electric’s products, these are integrated into a single package which is housed entirely within the wheel rim (see Fig. 1), but it would also be possible to house the inverter elsewhere in the vehicle.
The motor can provide both positive (accelerating) and negative (braking) torque, but friction brakes are retained as the braking requirements usually exceed the ability of the motor and for occasions where the vehicle’s electrical system is unable to accept the current that is regenerated during braking.

Fig. 2: Schematic of control in in-wheel electric motors.
The in-wheel motor is a torque producing device. In the example of Protean Electric’s motor, the vehicle control unit (VCU) communicates with the motor system via a controller area network (CAN) bus, sending torque demands every few milliseconds (see Fig. 2). In response, the motor system develops the demanded torque at the wheel hub. By return the motor reports its state of health and the maximum available torque. It can also report its speed which the VCU may use for advanced traction control functions.
Unlike internal combustion engines, electric motors can produce positive and negative torque in both directions. This is referred to as four quadrant operation and allows drive-trains with electric motors to enhance traction control and vehicle stability functions. Furthermore, electric motor systems have very fast response times. They are typically capable of switching from maximum positive torque to maximum negative torque or vice versa in less than 10 ms. High-frequency control is possible which can improve safety and handling of the vehicle, particularly with direct-drive in-wheel motors which provide torque directly at the wheel hubs without any intermediary shafts, axles or gears.
Note that the motor is not a speed-controlled device. The VCU cannot demand a speed from the motor system. As with a conventional drive-trains, the wheel speeds are a consequence of the torque applied at the wheel hub, combined with the resistance to rotation which is dominated by the vehicle inertia.
Differential and related functions
A differential is required where a single power unit, internal combustion engine or electric motor, is used to drive two wheels on an axle. Without it, the two wheels on the axle would be constrained to rotate at the same speed, which would lead to unacceptable vehicle handling and tyre wear. The differential is also the final gear ratio, amplifying torque from the drive-shaft to the axle shafts (see Fig. 3).
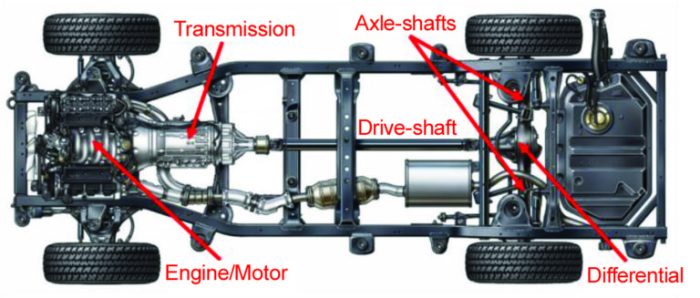
Fig. 3: Conventional rear-wheel drive vehicle showing the differential.
No differential is required for the non-driven wheels as they are not physically connected and are therefore free to rotate at different speeds.
Open differential
An open differential is the simplest and most common type of differential on road vehicles. The speeds of the wheels are determined by the vehicle kinematics, slightly modified by tyre dynamics. Ignoring wheel slip, during cornering, the outer wheel will rotate faster than the inner wheel. In a vehicle with track width t and rolling radius r, traveling at speed v around a bend of radius R, the approximate angular speeds of the inner and outer wheels are given by Eqn. 1
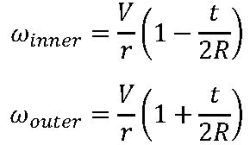
(Eqn. 1)
Note that this is purely a result of the geometry of the situation and the fact that the wheels are free to rotate independently; there is no dependence here on the torque being provided to the wheels (see Fig. 4). Accounting for tyre dynamics modifies Eqn. 1 slightly. The application of torque at a wheel results in so-called wheel-slip [1]. This does not mean that there is any loss of traction between the tyre and road; rather, it is a feature of the dynamics of the tyre. The result is that the relationship between the speed of rotation of the wheel and vehicle speed is modified according to:
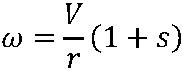
where s is the slip ratio. The slip ratio is a function of the torque applied and also of the properties of the tyre and the tyre-road interface [2]. The slip ratio can exceed 0,1 while good traction is maintained on a good road surface and with high torque applied. Accounting for slip, which may be different for the inner and outer wheels due to road surface differences, we obtain the wheel speeds in Eqn. 2.
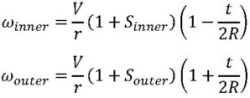
(Eqn. 2)
Since slip is a function of torque, there is now some dependence on the torque at each of the wheels. There are further minor modifications to Eqn. 1 which result from understeer or oversteer properties of the vehicle and road surface undulations, but they are not relevant to this discussion.
The important conclusions relating to the behaviour of driven wheels with an open differential are:
- The wheel speeds are completely determined after making the assumptions that equal torque is supplied to each wheel and that the two wheels on the axle are free to rotate at different speeds.
- The wheels find their “natural” speed which results in good handling and tyre behaviour during cornering.
As long as these two assumptions are true, it does not matter how they are achieved.
In-wheel motors and the open differential
The simplest way to control a pair of in-wheel electric motors on an axle is to demand equal torque of both motors.
Both wheels will be driven with the same torque regardless of any speed difference, as long as the VCU demands the same torque from both motors.
In a vehicle with in-wheel motors, the driven wheels are not physically connected by axle shafts, so they are not constrained to rotate at the same speed. As with an open differential, they are free to rotate at different speeds without constraints.
The two assumptions are therefore true in a vehicle driven by in-wheel motors, and Eqn.1 therefore also applies: The behaviour of the wheels in a vehicle powered by in-wheel electric motors is exactly the same as the behaviour in a vehicle with a central power unit driven through an open differential if equal torque is demanded of each in-wheel motor by the VCU.

Fig. 4: Ackerman geometry of a turning vehicle.
Although there is no physical mechanical differential, we will refer to this mode of controlling the in-wheel motors as the “electronic open differential”.
Limitations of the open differential
The open differential and electronic open differential suffer from the same limitations which occur when one wheel on an axle has significantly better traction with the road than the other, in which case:
- The maximum torque that can be supplied to either wheel is limited by the wheel with the lower traction limit.
- There is nothing to prevent the wheel with lower traction from spinning up if more torque is applied than the tyre-road interface can support.
There are several circumstances which can result in asymmetric traction limits across an axle:
- Cornering, where weight shifts to the outer wheels, reducing the traction limit on the inner wheels.
- “Split-μ” road surface, where one wheel is on a good road surface and the other on loose stones, ice or water.
- Off-road driving.
In conventional vehicles, there are a number of technologies employed to prevent a wheel spinning up and loss of torque capability in these circumstances. Some of these, and their equivalents for in-wheel motors, are discussed in this article.
Traction control system
A traction control system is designed to prevent a wheel from spinning up due to lack of traction with the road surface. It is implemented as part of the electronic stability control (ESC) system, which can apply the brakes individually to a wheel using the anti-lock braking system (ABS) unit. ESC is increasingly common and is now mandated in Europe and the USA for passenger vehicles.
The traction control system detects that a wheel is spinning up and applies the brake to that wheel. In addition to controlling loss of traction, this allows torque to be applied to the opposite wheel, even with an open differential or electronic open differential, since the brake counteracts the torque applied by the drive-train to the spinning wheel.
The TCS can be used with in-wheel motors in exactly the same way as it is in conventional vehicles, with the same results. No special action is required by the VCU.
Hand traction, on the other, can be controlled without the use of the brake-based ESC system in an in-wheel motor driven vehicle. The VCU uses the wheel speed information communicated by the in-wheel motors to determine when traction is being lost and reduces the torque demand on that wheel. This can be done without reducing the torque demand to the other wheel. The result can be superior to the action of a conventional TCS because of the fast response time of the in-wheel motor system and the ability of the motors to produce both positive and negative torque. We can refer to this as an electronic traction control system (eTCS).
The eTCS is somewhat similar to Antriebsshlupfregelung (ASR) systems which are part of the traction control system in some conventional vehicles and incorporate the modulation of engine torque.
Limited-slip differential
The limited-slip differential is a more complex form of mechanical differential. There are a number of different implementations in production, including some that have an element of electronic control. These are discussed separately here as “active differentials”.
In contrast to the open differential, which always distributes torque equally to the two wheels on an axle, the limited-slip differential distributes torque according to the relative speeds of the two wheels, which is achieved by adding a mechanism that resists relative speed differences between the two output shafts. Torque is reduced on the faster wheel and increased on the slower wheel, which prevents a wheel from spinning up while not reducing overall torque. Although this overcomes the main limitations of the open differential, it also results in greater torque provided to the inner wheels during cornering, which causes understeer.
In vehicles driven by in-wheel motors, the VCU can demand unequal torque from the two motors in response to the speeds reported by the motors in an exactly analogous way to the limited-slip differential. In practice, however, this does not give optimal torque distribution when there is no loss of traction. The eTCS with torque vectoring will give superior handling and traction control.
In a conventional vehicle with a limited-slip differential, it is possible to provide asymmetric torque across the axle without reducing the maximum total axle torque significantly. With in-wheel motors, on the other hand, the reduction of torque on one wheel does not allow an increase in torque of the opposite wheel beyond its maximum torque capability. This inevitably means that the total axle torque available from the two in-wheel motors is reduced by the torque asymmetry.
Locked differential
A locked differential can be effective for an off-road vehicle where the traction at the wheels is poor and very variable. The locked differential constrains the two wheels on an axle to rotate at the same speed. Torque is then naturally moved to where there is traction.
With in-wheel motors, the VCU can implement speed control loops on each of the driven wheels to achieve the same effect. As described here, the motors themselves do not incorporate speed control but the communication between motors and the VCU has sufficient bandwidth to enable the vehicle control unit (VCU) to run control loops to regulate the wheel speeds.
Active differential
The active differential is a modern system implemented on some performance vehicles which improves handling and control by actively managing the torque distribution. The system responds to various sensors around the vehicle which monitor the driver intent and the vehicle response, which are interpreted by the electronic control unit (ECU). The ECU then instructs an electronically controlled differential which can distribute torque as demanded. Apart from traction control, such a system can improve handling and stability. Mechanically, an active differential is implemented as an electronically controlled limited-slip differential. Two clutch packs can typically be controlled electronically to transfer torque from one axle shaft to the other, so modifying the behaviour of the underlying open differential under the control of vehicle dynamics control systems in the vehicle. An example of such a system is the GKN electronic torque vectoring module implemented in the BMW X63.
The electronically controlled differential is a complex and expensive component. Similar functionality can be achieved without the addition of mechanical components in an in-wheel electric motor driven vehicle. In this case, the VCU performs similar calculations to those that the ECU would perform for an active differential, and makes asymmetric torque demands to the two wheel motors accordingly. This is sometimes known as torque vectoring and can be used to:
- Improve vehicle stability at high speeds.
- Improve vehicle stability in the presence of disturbances such as side-wind or ruts in the road.
- Improve vehicle agility at low speeds.
- Improve cornering feel and control.
Torque vectoring with in-wheel motors is advantageous over an active differential in a conventional vehicle, not only from a component cost and mass perspective, but also because the system is more responsive and can react better to transient situations. It can also inject braking torque seamlessly, without using the braking system which extends the system’s ability to maintain vehicle control.
Equivalence of conventional vehicle and in-wheel motor vehicle
Table 1 summarises various differential and related systems found on conventional vehicles with a central combustion engine or electric motor, and describes the implementation on an in-wheel motor driven vehicle that results in the same behaviour.
In general, wheel speed management and, therefore, vehicle handling in an in-wheel motor vehicle can be superior to a conventional vehicle, and implemented with less complexity and cost.
All-wheel drive
This discussion has considered a pair of driven front wheels or a pair of driven rear wheels on a vehicle. All conclusions apply equally to a vehicle with in-wheel motors on all four wheels.
For instance, sending equal torque demand to all four in-wheel motors gives exactly equivalent behaviour to a conventional all-wheel drive vehicle with open-differentials front and rear and an open centre differential. All four wheels are free to rotate independently and equal torque is applied to each wheel hub.
Conclusion
In-wheel electric motors offer the possibility of improved vehicle dynamics control at lower cost and complexity relative to conventional vehicles that transfer power to wheels via a differential.
| Conventional vehicle system | Equivalent for in-wheel motor driven vehicles |
| Open differential | Equal torque demand to both motors |
| ESC based traction control | ESC based traction control as in conventional vehicle, or reduce torque demand on slipping wheel |
| Limited slip differential | Reduce torque fraction to faster wheel according to differential speed |
| Locked differential | Implement speed control loops for each motor in VCU |
| Active differential | Torque vectoring function in VCU |
The simplest implementation of vehicle control for in-wheel motors, always demanding equal torque from all motors, will result in behaviour exactly the same as in a vehicle with an open differential, but without the need for the mechanical differential or axle shafts. This behaviour can be overlaid with the same brake-based traction and/or stability control systems as used in conventional vehicles to prevent wheels from spinning up during cornering or on low traction surfaces. On the other hand, improved traction control and torque vectoring functions can be achieved with no added bill-of-materials by modulating the torque demanded of the electric motors, in contrast to conventional vehicles which require complex, heavy and expensive mechanical systems such as an active differential to achieve a similar result.
References
[1] M Blundell and D Harty: The multibody systems approach to vehicle dynamics, Oxford, UK: Butterworth-Heinemann, 2004.
[2] HB Pacejka: Tire and vehicle dynamics, Oxford, UK: Butterworth-Heinemann, 2002.
[3] GKN plc. (2016, March 10): “Electronic torque vectoring” (online), available: www.gkn.com/driveline/our-solutions/trans-axle-solutions/limited-slip-and-locking-differentials/Pages/electronictorque-vectoring.aspx
Contact Mark Haworth, Protean Electric, mark.haworth@proteanelectric.com